Some questions about the “berth to berth” concept applied to ECDIS
Background:
1. Starting at the IMO RESOLUTION A.893(21) adopted on 25 November 1999 Guidelines For Voyage Planning, the passage planning must include:
“detailed planning of the whole voyage or passage from berth to berth, including those areas necessitating the presence of a pilot”.
That is, harbor and other confined waters are considered in the same way that open waters
2. ECDIS, now “primary means of navigation” and therefore having now a lot of legal implications, has evolved from a simply graphic expression of sailing proposal to a regulatory tool in which a very specific behavior is expected. Now, a line drawn on ECDIS is not only a guideline, but a strictly compulsory course. Further STM development will increase this trend.
3. The combination of these two factors has already involved significant changes in what refers to the practice of port pilotage. Now, pilots would agree with the master the track to be followed.
4. Increasingly, these tracks are not drawn by the master, but decided at the Company headquarters.
5. Authorities have a clear tendency to assimilate ships to planes in order to control it them in a very rational, technological way.
Issues:
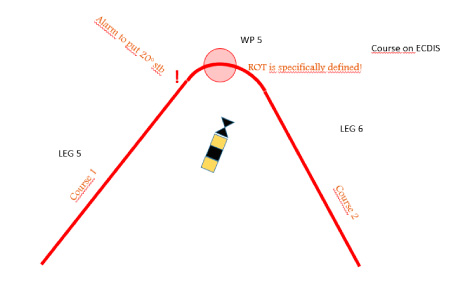
1. Line change from a “guideline” to a compulsory route is obviously conceptual, but its reflection on drawings is not. We are using the same leg+waypoint structure as always.
2. As a “leg” clearly corresponds to a ship real behavior, the maneuvers that implies a waypoint are usually far from real life, and more especially on confined, harbor areas. For instance, the use of tugs or anchors is not reproducible.
3. Nowadays, many passage plans to a large number of ports are not susceptible to be validated, as “safety deep” can be exactly adjusted to ship’s needs, but “safety contour” cannot. The system give an standard safety contour.
4. “Not Validable” routes.
When a safety depth is chosen, the system will not use it, but it provides the nearest one among the available ones, commonly -5, -10, -15, -20 m.
For instance, a vessel has a draft of 12,6 m and once squat effect, UKC and tide added, the safety depth could be 14,6 m, very close to destination basin maximum deep. If the ENC has depth contours for -10 m and -20 m, the ECDIS will chose the 20 m curve for the safety contour, and any depth below this will be a no go area.
According to an answer given by the Nautical Institute,
“depth contours on some ENCs can be relatively far apart, and sometimes do not permit their simple use when navigating close to shallow waters, such as on port entry. In such areas soundings enhanced by appropriately set safety depths must be used. However, providing the ECDIS in use does not trigger a recurrent alarm that needs continuous acknowledgement, it should not be necessary to change the safety contour when navigating in such waters. Instead, the ECDIS will continue to provide a visual reminder on the chart that the situation requires care,”
For sure, situation requires care, and alarms can be more or less neglected, but the REAL PROBLEM is that we cannot VALIDATE the route and the, we are not fulfilling the regulatory standards.
5. Legally, this kind of routes are unsafe, and then master becomes a virtual rogue or offender. But all this is again, far from real world. Masters and OOW perfectly know this issues derivate from ECDIS and they do their best to avoid these issues, mainly by reducing many parameters as safety deep, lateral distance, turning radius and so, until route can be validated, even if they know that things will not happen like this.
6. Pilots usually see ECDIS as a source of new problems and controversies with masters that they have not in old times when using paper charts.
An example
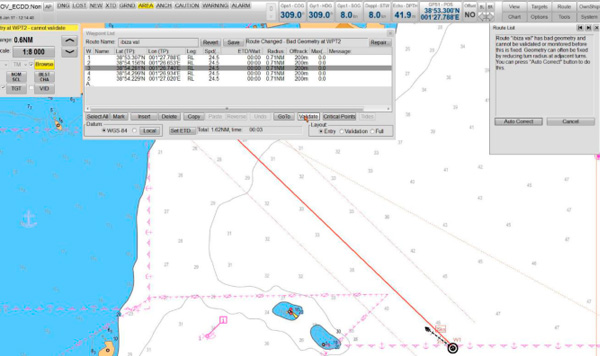
Here is showed a passage plan “berth to berth” on “pilot waters” at Ibiza port, planned for a big cruise propelled by Azi-pods.

Once the route has been accurately drown, arriving to the berth, it is not possible to validate, due that on some waypoints the route has “bad geometry”, meaning that turning radius results too tight. But, what is the minimum Azi-pod turning radius? Obviously, even the concept of “bad geometry” has no sense in this case.
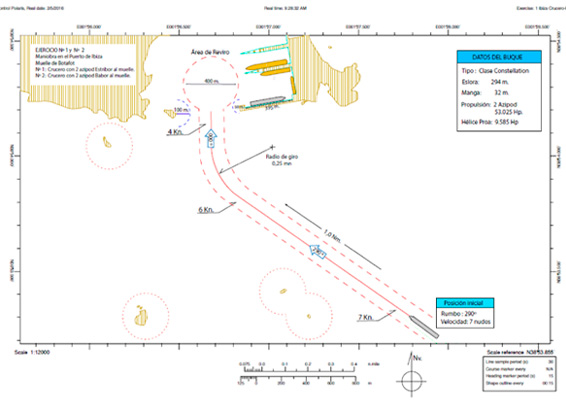
On the other hand, the pilot has develop its own passage plan for the same route, but exclusively devoted to pilots waters.
All the info relevant for a safe passage is showed in the form of “safe track”, in the sense that the risk for the ship starts when she “left” the area, but anything than happens inside these limits can be cosidered as appropiated, independtly of the geometry of the followed course.
Proposals:
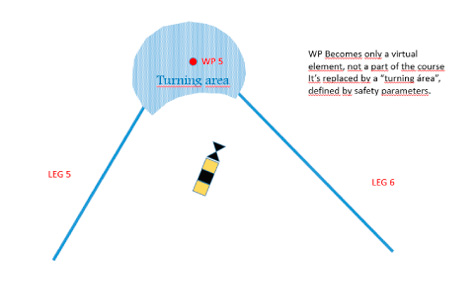
1. To try to define a different kind of waypoint, name it “undefined course area” or simply “turning area” where no constrains to free sailing will be applied other than COLREG.
2. To include on EMSN some “pilot to pilot” validate routes, but finally arriving to the berth, in order to analyze their possible advantages for a more logical STM development.
References
IMO: ANNEX 25 - Guidelines For Voyage Planning - IMO Resolution A.893(21)
The Nautical Institute web: http://www.nautinst.org/en/forums/ecdis/ecdis-issues--enc.cfm/E9safetyc…
By Antonio Lista , Covadonga Suárez & Sergio Pérez
Ship handling and Navigation Area
Gijón, Spain. January 2017
SÍGUENOS