Advances in Under Keel Clearance Risk Management
SUMMARY: Traditionally, ports have operated under fixed rules which govern the minimum under keel clearance (UKC) to permit safe transit along port approach channels. To ensure safety, these fixed UKC rules are determined by requirements under extreme swells and negative tidal residuals. These rules have been in existence for many years and are often believed to be fool proof as in most cases they have an unblemished safety record but they can fail1, often with disastrous consequences. Technology is now available to effectively mitigate the risk of grounding. These systems, model vessels dynamically in real time to accurately calculate the underkeel clearance; this ensures that a vessel cannot transit unless it is safe to do so. But there are additional productivity gains in using such systems. The fixed rules are designed to cover the worst possible conditions, so under most environmental conditions a vessel can usually sail with increased draught and/or tidal windows.
This technology is used operationally in the Dynamic Under-Keel Clearance System (DUKC®) developed by OMC International. It is a real time under-keel clearance (UKC) system used by ports and shallow waterways to maximise port productivity and safety. The DUKC® considers all factors that affect the UKC of a vessel transiting a channel to determine the minimum safe UKC requirements. DUKC® seamlessly interfaces probabilistic UKC planning (maximum draught & tidal windows) up to 12 months in advance with short term transit planning utilising real time environmental and vessel specific information and also with UKC monitoring throughout the transit to deep water. With a track record of 19 years and more than 90,000 vessel transits globally without incident, DUKC® has a strong history as an operational tool.
The latest version, DUKC® Series 5, integrates proven core calculation engines with a web interface thus allowing easy accessibility to the system for approved users world-wide. DUKC® users are able to successfully execute under keel clearance related tasks via the web rather than the traditional desktop-based user interface. The web interface has gained acceptance by pilots as it allows on-board calculations through a laptop or tablet, such as an iPad.
This paper outlines the differences between static and dynamic systems. It discusses the important features of a dynamic system and how a dynamic system improves the decision making processes both ashore and on-board.
1 Introduction
The majority of ports in the world use static rules to determine the safe underkeel clearance of a vessel. These static rules often use the vessels draught as the baseline to determine the underkeel clearance; however it is contended that this method can be erroneous as they are based on the assumption that this clearance is sufficient regardless of the prevailing environmental conditions.
In practise, the actual safety clearance is determined by the conditions on the day, and under static rules the clearance for a vessel varies for every transit. For most of the time the static rules will be conservative, but evidence shows that up to five percent of transits are marginal, even unsafe2.
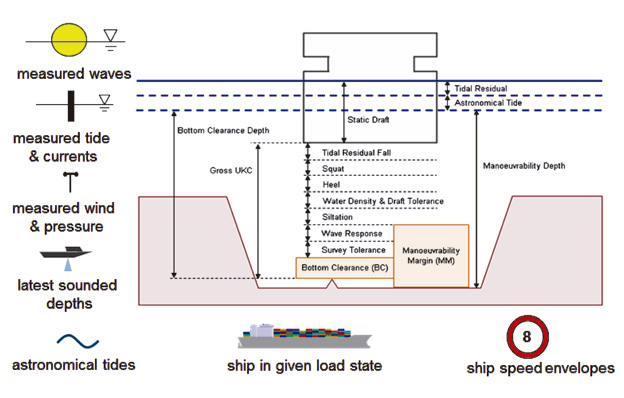
By contrast, a dynamic under keel clearance system (DUKC®)3 utilises real time under-keel clearances in ports and shallow waterways to maximise channel safety and also productivity. The DUKC® considers all factors that affect the UKC of a vessel transiting a channel to determine the minimum safe UKC requirements. The system does not use the vessels draught as the baseline, but a pre-determined safety limit which must not be breached; added to this limit are the vessel’s dynamic movements which are modelled using the predicted environmental conditions and this gives the minimum water level that is required to ensure safety at all times throughout a planned transit.
The methodology behind dynamic underkeel clearance has been internationally recognised, and the improved certainty and information that dynamic systems can deliver has seen regulatory bodies, i.e. IALA and PIANC4, regarding such systems as an essential Aid to Navigation (AToN) and these bodies are developing standards for dynamic underkeel clrearence systems.
Melbourne-based OMC International (OMC) continues to be the only specialist maritime firm in the world whose core focus is providing proven technology for determining and managing real-time UKC in depth-restricted waterways, typically approach channels to ports. With a track record of 19 years and more than 90,000 vessel transits globally without incident, OMC’s DUKC® has a strong history as an operational tool and safety has always had the upmost importance. Increasing international recognition is being given to the significant benefits which dynamic determination of underkeel clearance provides as a risk mitigation tool and many ports have become increasingly interested in installing DUKC® for safety and risk management purposes. However, DUKC® systems have also been widely recognised for the enormous economic benefits provided to waterway owners and users by reducing the inefficiencies inherent in the static rules when the environmental conditions allow.
OMC’s knowledge of hydrodynamics, ship dynamics and experience in system delivery provides a proven model of UKC management. DUKC® offers a paradigm change in this critical area of maritime safety. International bodies have identified DUKC® as a core e-Navigation concept, which is available and operational today.
2 Static Rules
Traditionally, ports have operated under static rules which govern the minimum under keel clearance (UKC) to permit safe transit along port approach channels. These static rules were devised when vessels were smaller, their speeds lower, ship/shore communications poor and technology generally unavailable to determine ship motions accurately. Therefore, there needed to be a simple method of calculating a safe underkeel clearance, and the accepted practise, was/is to calculate the underkeel clearance as a proportion of the vessels draught. Whilst any ratio could be used, most ports use ten percent unless conditions dictated otherwise. PIANC5 guidelines reference this ratio, but it is often forgotten that this is a minimum suggested safety clearance and is for calm waters only, and that twenty, even fifty, percent may be better, especially for ports that are subjected to wave motions.
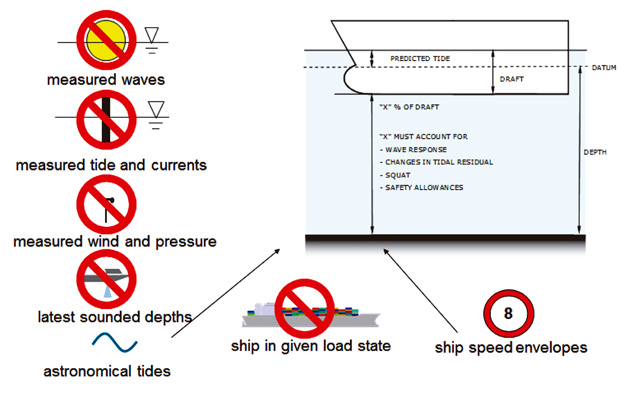
The static rule tries to capture all anticipated factors6 in a single allowance. Essentially the only controllable factors is the tide height (and therefore transit time) and speed (which determines the amount of squat). Where there is deep water, or little or no wave motions this may be suitable, but where depths are critical, and conditions more variable, there may be times when the allowance is marginal. It could be suggested that the “static rule” approach is a “top-down” approach, where the clearance is determined from the draught; from this each of the factors are removed leaving the net underkeel clearance.
Some ports do try to assess some of the factors, and this could be viewed as an advanced static rule. But whilst some of these factors can be pre-calculated, predicted wave response (in real time) is impossible to calculate without significant processing power and access to environmental data; so in practical terms wave motions are undeterminable once a transit commences. To address this issue, some ports apply a pre-determined roll/pitch angle to give the ship-handler an indication of loss of underkeel clearance due to wave motion7.
Speed is an absolutely critical element in maintaining safe UKC. Evidence has shown that pilots do not always maintain vessel speed within the planned limits. If the transit is too fast, the ship will squat8 and heel in excess of the predicted amounts: both effects are approximately proportional to the square of the speed; if too slow the ship will not reach way points at required times and, in tidal waterways, may therefore “lose” more water than predicted. Once underway these elements can be difficult to assess and can often be overlooked. Most ports will use a single squat formula, but there are many formulae in existence; the most appropriate formula will depend on the bathymetry, channel design and the type of vessel. Often a ship-handler will calculate the squat for a single critical point, but in practise the vessels squat is continually changing throughout the entire length of the transit.
The biggest drawback with static rules is that they are wholly dependent on the environmental conditions. If they are too optimistic safety could be jeopardised; too conservative and they become uneconomic; so they are blunt compromise, and for safety reasons will often be derived for the worst case scenario. The actual net clearance is proportional to the environmental and transit conditions, but at the same time unresponsive to change; this means a port cannot maximise efficiency when conditions allow. More worryingly, a port will not be aware when conditions are actually unsafe9, because when static rules are used, the level of risk is variable and the net underkeel clearance on any particular transit is unknown.
3 Dynamic Underkeel Clearance Systems (DUKC®)
By contrast, dynamic underkeel clearances are determined based on the actual vessel and its stability parameters, real-time met-ocean conditions (wave height, period and direction, water levels, currents, tidal plane, wind), vessel transit speed and waterway configuration, including detailed bathymetry, at the time of sailing. Wave spectra, ship speed and water depths vary along the transit and the effect of these variations is computed by the numerical ship motion model used in each DUKC® system. In addition, wave spectra and tidal residuals will change over time, and these effects are accounted for in each system. With respect to squat, individual ships and the pertinent characteristics of the complete approach channel are modelled in each dynamic system, using the most appropriate squat formula, and include the effect of temporal and spatial variation of tidal currents during the transit.
Dynamic systems can be viewed as a “bottom up” approach. The system has, at its core, a minimum limit10 that must not be breached. Each of the computed factors is then added until the minimum tide height is found that ensures a safe transit. Thus when the conditions are favourable vessels may have greater tidal windows and/or can sail with a deeper draught; but when conditions are not then tidal windows are reduced, and may even be closed, or a vessel may be able to proceed but with a lighter draught.
The system is also predictive, so if a pilot wishes to adapt his transit plan (especially the transit leg speeds), or if there is an unforeseen event (e.g. a berth delay), or there is a change in the environmental conditions the system will automatically update the safe transit windows
OMC’s Dynamic Underkeel Clearance system DUKC® is today a mature product. The day-to-day operation11 of DUKC®, in preference to static rules for UKC, has moved the system from academic theory into a best practice in the real world. Integration of the sophisticated numerical calculations (the “engine”) with real time environmental data (wave, current and tide) ensures integrity and quality at the critical interface between the UKCM system and the dynamic data.
The accuracy of the numerical models used in the DUKC® System has been validated by undertaking more than 300 ship transits world-wide to obtain full-scale measurements of vessel speed, track and vertical displacements. These validation tests have been undertaken for a wide variety of channel widths, configurations and lengths, vessel types, sizes and stability conditions, vessel speeds, wave conditions, tidal regimes and current speeds. This modelling guarantees the accuracy and applicability of the models within the DUKC® system; each installation uses customised numerical models to calculate the UKC requirements of the particular ship sailing in the particular waterway in the environmental conditions at the particular time.
The system has also been rigorously and independently tested by specialist risk management consultants to ensure that it satisfies internationally-accepted levels of risk for safely managing the UKC of vessel transits12.
The DUKC® product suite is continually being adapted in response to customer feedback and availability of new software technologies since the first installation (DUKC® Desktop) in 1993. New applications developed and deployed include the integration of the technology onto laptops (or smaller devices) carried by pilots and into VTS Centres enabling vessel speed and predicted under keel clearance ahead to be monitored on board and ashore.
4 DUKC Series 5 - Product Overview
OMC International DUKC Series 5 product suite, integrates the proven core calculation engines into a web interface. DUKC® users are able to successfully execute under-keel clearance related tasks via the web rather than the traditional desktop-based user interface.
The DUKC® Series 5 software consists of several modules integrated behind a single web portal. Each module is self-contained, developed and tested under ISO standards, and proven in the unforgiving world of maritime operations. The modules can be arranged and configured to help manage underkeel clearance related problems ranging from long-term voyage planning to real-time onboard pilotage applications and to the monitoring of numerous vessels in real-time within a VTS environment.
At the heart of the DUKC® Series 5 software suite is a pair of critical engines: An Environmental Forecast Engine and a UKC Calculation Engine. Each engine consists of tested and proven sub-components. Built on top of the core engines are services which provide DUKC® applications with both web and non-web access to the underlying engines.
Custom web site configurations are built on top of the DUKC® Series 5 web interface template to match customer’s required look and feel. Custom interfaces between the DUKC® Series 5 modules and the various met-ocean sources, ship information systems and VTS users are configured (or developed where necessary) by OMC for the UKCM system.
Networks of external data sources such as met-ocean sensors, AIS data streams and GPS positions are provided to the DUKC® system as required. All DUKC® outputs, diagnostics and statistics can be logged, queried or distributed in real-time to users.
From the full collection of DUKC® Series 5 modules, numerous Web Services can be configured to provide a UKC management system for any waterway.
Engines
The Calculation Engine and its subcomponents manage everything from complex vessel motion calculations to the logic of transit planning. Its purpose is to compute and solve underkeel clearance questions.
The Met-Ocean Engine is at the centre of all met-ocean inputs to the underkeel clearance calculations. Its three primary functions are:
• Quality Assure and Filter: to quality assure and filter all met-ocean inputs
• Data assimilation and prediction: to integrate all available met-ocean measured and predicted data, ranging from astronomical predictions to real-time sensor measurements to third-party (inc. national weather service) forecasts, and to produce short term, medium term and long-term met-ocean forecasts.
• Spatial Transformation: to predict met-ocean conditions in between and beyond sensor positions. For example, the engine computes tidal heights and streams between tide gauges and current meters.
Web Services
1. Voyage planning service
The long-range (>24 hours) under-keel clearance planning component uses met-ocean forecasts and climate statistics to estimate what the short-term (0-24 hrs.) sailing advice of the DUKC® will be at some future date.
The Voyage Planning Service calculates the probability of waves and tides from astronomical tide forecasts and historical wave and tide statistics, and uses these to calculate the most likely tidal window or maximum draught for a vessel. The level of probability is set to ensure that the vessel can transit but a user can decide on a greater ‘risk profile’ which would allow a greater draught but with the risk of missing a tide. This allows a scheduler to specify the level of certainty for the ship to transit without delay.
2. Met-ocean service
Allows interactions with the met-ocean engine described above and handles all requests related to met-ocean data. OMC has unified met-ocean data displays available which are able to display met-ocean measurements, forecasts and predictions from many different sources within a single view.
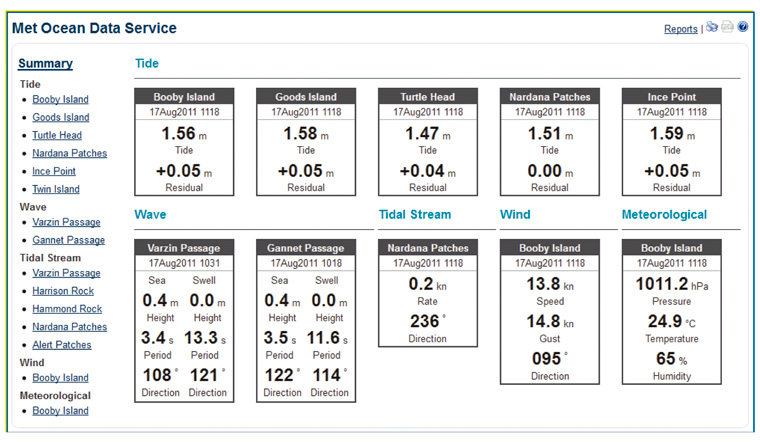
Sample output from a met ocean service
3. Vessel service
The vessel service allows interaction with a comprehensive list of recognised vessels, and their particulars; this is used as the authoritative source of vessel information within the system. The vessel service can be linked up to external vessel data sources such as port information systems.
4. Transit planning service
The transit planning service manages real-time to short-term predictions of under-keel clearance, which are automatically updated from latest met-ocean observations.
The Transit Planning Service is used to plan vessel transits (including providing speed control functionality in the planning) through the specified waterway using the latest met-ocean observations and accurate vessel load state information and AIS positions.
This service is the core module for safe passage planning and allows accurate pre-planning, monitoring and contingency planning of a transit. Access to this service is possible in real-time or there is the capability of producing comprehensive hard-copy passage plans for the pilot to take onboard.
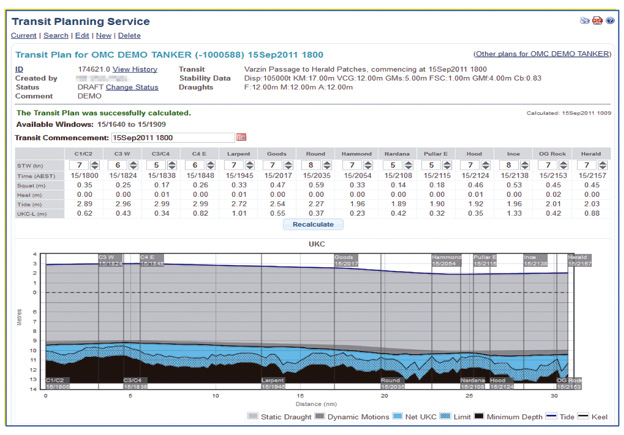
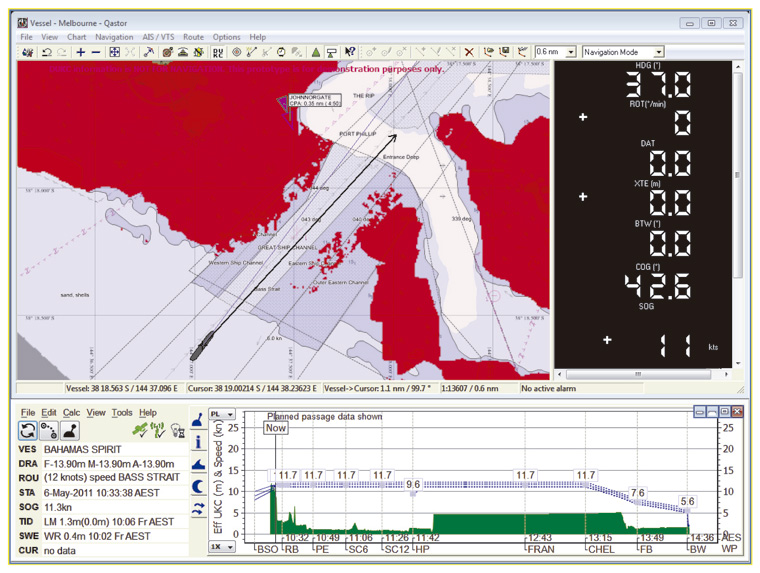
Sample output from Transit Planning Service
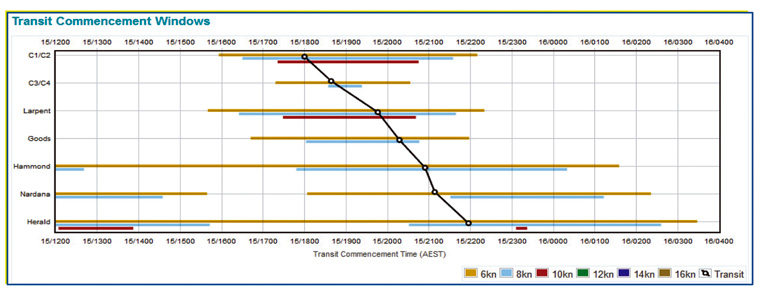
Sample output of speed/tidal gates for each key control point from the Transit Planning Service
5. Optimiser Planning service
The optimiser planning service allows the optimisation of multiple vessel departures on a single tide whilst considering constraints such as tug availability, current restrictions and booking priorities.
6. Operations - Transit Monitoring Service Shore-based
The transit monitoring service automatically tracks and monitors the under-keel clearance of 'active' transit plans. Users who have been assigned permissions to access monitoring functionality can track the under-keel clearance of one or more vessels simultaneously.
The under-keel clearance information is updated continuously based using the latest met-ocean observations, vessel load state information and AIS positions. Tracking of vessels occurs automatically once a transit plan has been issued ('activated'). The Transit Monitor Service includes a monitoring chart that gives operators a geographic view of the UKC status of all vessels being tracked.
7. Operations - Transit Monitoring Service On-board
OMC on-board solution provides UKC related information displayed within a charting package environment as overlay on top of a chart. This allows UKC information to be displayed more intuitively to marine pilots and allows horizontal navigation aspects to be included in the assessment of under-keel clearance.
The chart overlay display of under-keel clearance information allows pilots to make on the fly navigation decisions from an under-keel clearance perspective. For example:
• Decisions about safe passing areas
• Assessment of the impact of speed increases on the safe travelling corridor
• Assessment of local shoals on the safe travelling corridor (particularly important where high spots remain after capital or maintenance dredging campaigns)
The following figure shows a screen shot of a vessel transiting in swell conditions. Red areas indicate 'no-go' regions where the DUKC® predicts the vessel to have insufficient under-keel clearance due to dynamic ship motions.
Sample overlay of Go/No go areas for a vessel transiting in swell conditions
8. Reporting service
Allows searching and retrieval of archived outputs, previous calculations, errors and diagnostics. All calculations, errors, system messages and diagnostics are logged and can be queried if desired.
Underlying the core engines and services are the various data storage components. Data storage structures include databases for vessel details, voyage plans, transit plans, met-ocean data and business messages.
5 Conclusions
The use of static rules at many ports needs serious consideration about whether they are suitable and if all factors are understood. The paradox of the static rules is that without an incident a port’s static rules may appear validated and considered safe. In reality, where underkeel limits are critical (which is increasingly the case with ever larger vessels being launched), and conditions variable, there may be times when the clearance is marginal and the port has experienced an unknown “near miss”.
Recent developments in navigation technology make possible accurate planning and the continual monitoring, and control of the UKC of large vessels during transit along shallow waterways. These decision support tools, and the integration into navigation systems, such as a pilot’s PPU, also allow the effect of alternative speed/sailing options on under keel clearance to be quickly investigated by pilots and masters in situation where the passage does not proceed as planned. The information that is now available through a dynamic system enhances the decision making processes, of the port and pilot, and complements the master/pilot information exchange.
Dynamic underkeel clearance systems have a proven track record over 19 years and its use will only increase throughout the maritime industry. As the methodology builds on the concept of a minimum clearance limit that must not be breached, a dynamic underkeel clearance systems effectively controls the risk of a touch-bottom/grounding incident. This level of risk cannot be achieved with static rules because the clearances vary and are determined by the environment present on the day.
For more information contact Jonathon Pearce jonp@omc-international.com +447833517006
NOTES
1.- Whangarei, New Zealand, 2003, when the existing rules failed after 30 years in ‘safe’ operation.
2.- OMC’s historical records show approximately 95% of vessels are conservative, 4% marginal and 1% potentially unsafe
3.- DUKC® is the trademarked product of OMC International to determine dynamic underkeel clearances
4.- International Association of Lighthouse Authorities and Permanent International Association of Navigation Congresses
5.- Underkeel clearance for large ships in maritime fairways with hard bottom; Supplement to Bulletin No51 (1985);
6.- Factors include: Tidal residual (difference between predicted and actual tides); Tidal change during transit; Allowance for unfavourable metrological conditions; Water density; Squat (from ship speed); Wave response; Sounding errors; Sedimentation, Localised phenomena such as standing waves.
7.- Loss of UKC = Tan Roll * Beam. However it should be remembered that two vessels, of the same dimensions, but with differing stability will react differently in the same environmental conditions
8.- Squat is an hydrodynamic phenomenon by which a vessel moving through water creates a localized area of lowered pressure that causes the vessel to “apparently increase in draught” and be closer to the seabed than would otherwise be expected. It is approximately proportional to the square of the speed of the ship.
http://en.wikipedia.org/wiki/Squat_effect
9.- Whangarei, 2003. Two vessels “Capella Voyager’ and ‘Eastern Honour’ ground under existing static rules, which were considered safe.
10.- The limit/s can be found in PIANC, 1985 (Underkeel Clearance for Large Ships in Maritime Fairways with Hard Bottom. Report of a Working Group of the Permanent Technical Committee II. Supplement to Bulletin No. 51 (1985)). The limits used in a dynamic system are the PIANC’s Bottom Clearance and Manoeuvring Margin limits, but any stipulated minimum limit could be used.
11.- DUKC® was first installed in Hay Point, 1993. To date it has been operational in 21 ports for over 19 years with 90,000 safe sailings,
12.- The Port of Melbourne also undertook two independent risk assessment studies and these extensive risk management studies concluded that the full complement of DUKC® navigation software would significantly reduce the risk of large vessels grounding in port approach channels.
Artículo publicado en la revista "Prácticos de Puerto" - Número 70 -Junio 2012
SÍGUENOS